Robot Pose Tracking in the Wild
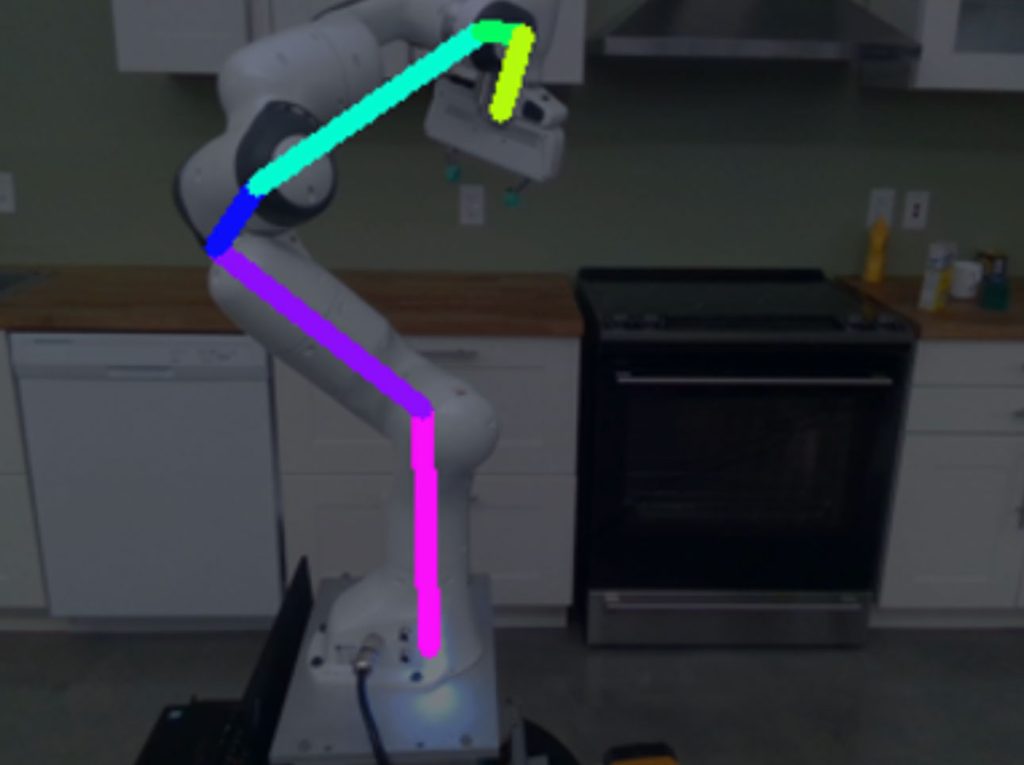
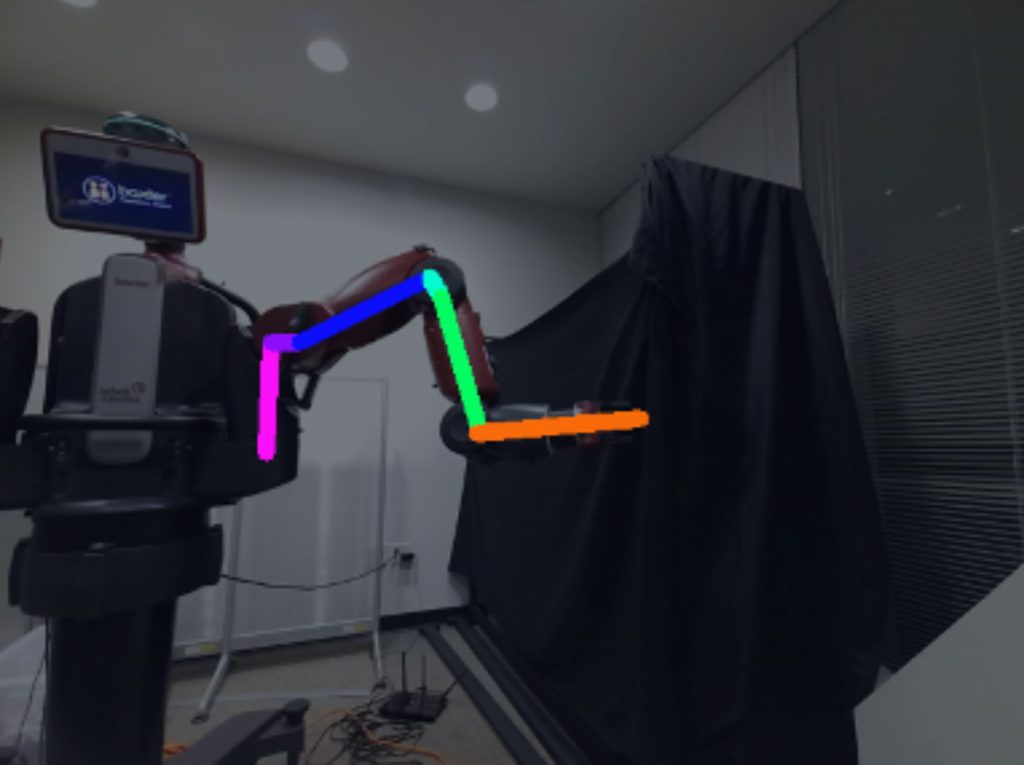
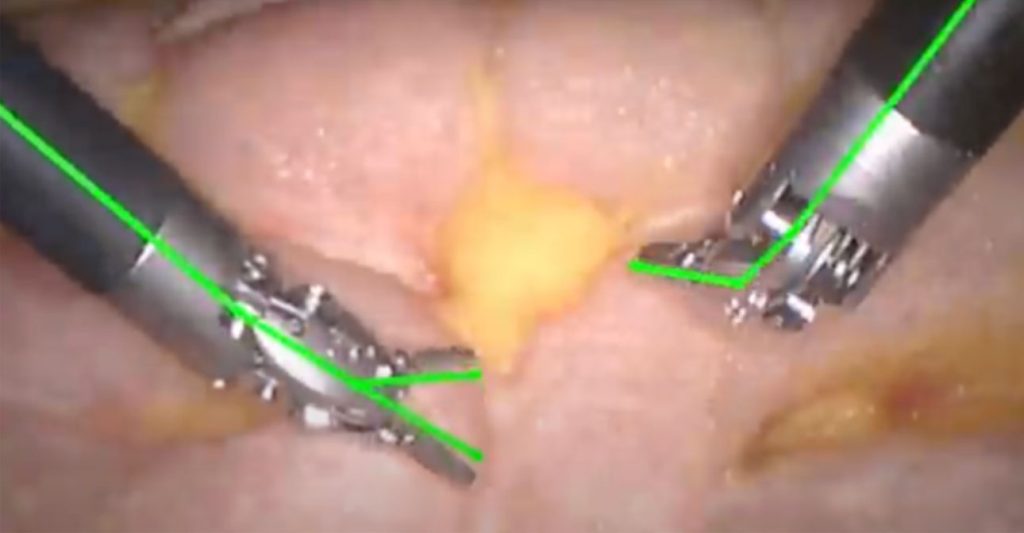
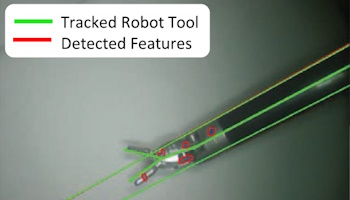
Solving the robot pose is a fundamental requirement for vision-based robot control, and is a process that takes considerable effort and care to make accurate. Traditional approaches require modification of the robot via markers which make them unsuitable in most unstructured environments. Our goal is to investigate the possibilities of tracking robots in the wild, in unforseen scenarios, to pursue autonomous robot-camera calibration, dynamic visual servoing, and even transfer learning. In this project, we utilize advanced computer vision and robot state estimation techniques for estimating the robot's pose in dynamic environments. We focus on tracking the pose of various robots, including robot manipulators, surgical robots, and snake robots, and consider how foundation models may both leverage and be leveraged by these techniques.
Students & Collaborators
- Jingpei Lu
- Shan Lin
- Florian Richter
- Lucas Liang
- Tristin Xie

Publications
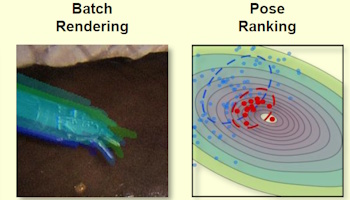
Real-time Rendering-based Surgical Instrument Tracking via Evolutionary Optimization
arXiv preprint arXiv:2603.11404 (2026)
Hanyang Hu, Zekai Liang, Florian Richter, Michael C Yip

Efficient Surgical Robotic Instrument Pose Reconstruction in Real World Conditions Using Unified Feature Detection
arXiv preprint arXiv:2510.03532 (2025)
Zekai Liang, Kazuya Miyata, Xiao Liang, Florian Richter, Michael C Yip
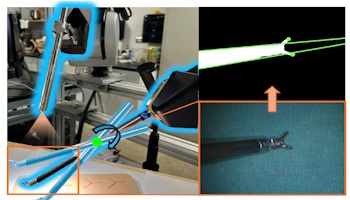
Differentiable Rendering-based Pose Estimation for Surgical Robotic Instruments
Proc. IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS) (2025)
Zekai Liang, Zih-Yun Chiu, Florian Richter, Michael C Yip
KineDepth: Utilizing Robot Kinematics for Online Metric Depth Estimation
Proc. IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS) (2025)
Soofiyan Atar, Yuheng Zhi, Florian Richter, Michael Yip
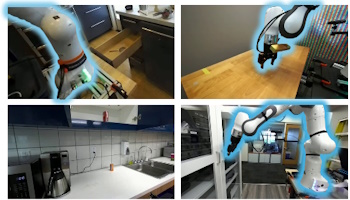
CtRNet-X: Camera-to-Robot Pose Estimation in Real-world Conditions Using a Single Camera
Proc. IEEE International Conference on Robotics and Automation (ICRA) (2025)
Jingpei Lu, Zekai Liang, Tristin Xie, Florian Ritcher, Shan Lin, Sainan Liu, Michael C Yip
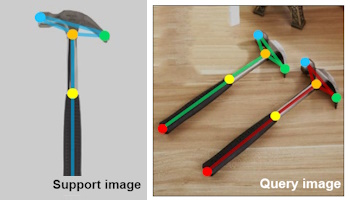
AnyOKP: One-Shot and Instance-Aware Object Keypoint Extraction with Pretrained ViT
Proc. IEEE Conference on Robotics and Automation (ICRA) (2024)
Fangbo Qin, Taogang Hou, Shan Lin, Kaiyuan Wang, Michael C Yip, Shan Yu
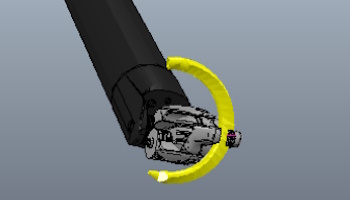
Real-time constrained 6d object-pose tracking of an in-hand suture needle for minimally invasive robotic surgery
Proc. IEEE International Conference on Robotics and Automation (ICRA) (2023)
Zih-Yun Chiu, Florian Richter, Michael C Yip BEST PAPER AWARD
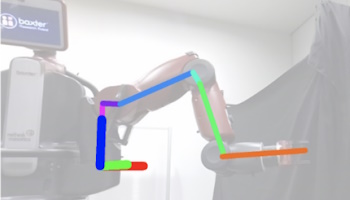
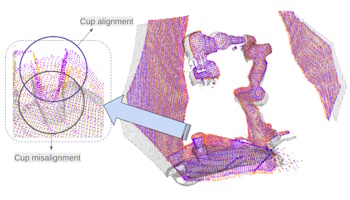
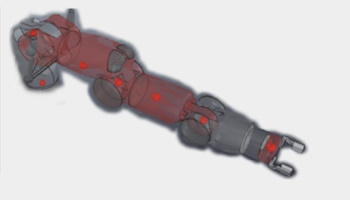
Image-based pose estimation and shape reconstruction for robot manipulators and soft, continuum robots via differentiable rendering
Proc. IEEE International Conference on Robotics and Automation (ICRA) (2023)
Jingpei Lu, Fei Liu, Cedric Girerd, Michael C Yip
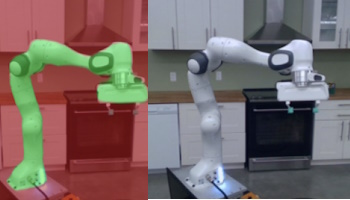
Markerless camera-to-robot pose estimation via self-supervised sim-to-real transfer
Proc. IEEE/CVF Conference on Computer Vision and Pattern Recognition (CVPR) (2023)
Jingpei Lu, Florian Richter, Michael C Yip
Pose estimation for robot manipulators via keypoint optimization and sim-to-real transfer
IEEE Robotics and Automation Letters (2022)
Jingpei Lu, Florian Richter, Michael C Yip
Robotic tool tracking under partially visible kinematic chain: A unified approach
IEEE Transactions on Robotics (2021)
Florian Richter, Jingpei Lu, Ryan K Orosco, Michael C Yip