Muscle-Powered Robots
Achieving human-like or animal-like performance in robotics it’s a tough problem. The musculoskeletal systems in our bodies are well-tuned for high-strength and quick-reflexes, while being fluidic and highly-dexterous. Achieving robotic performance that matches or exceeds the performance of natural muscle must therefore match many of these qualities.
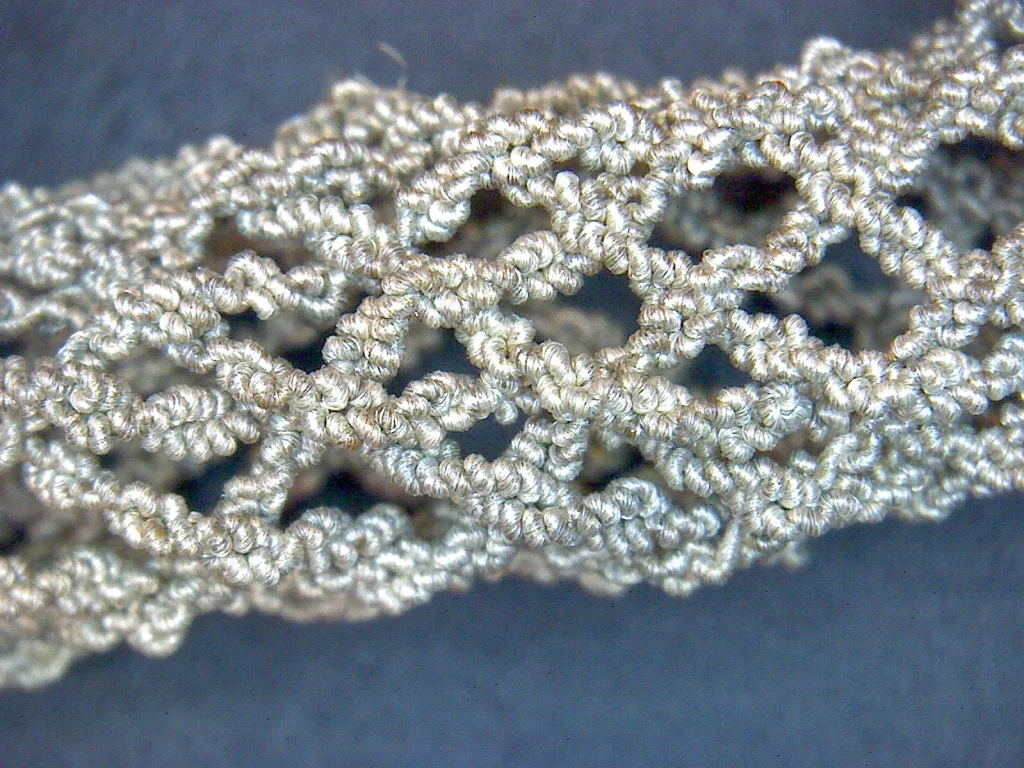
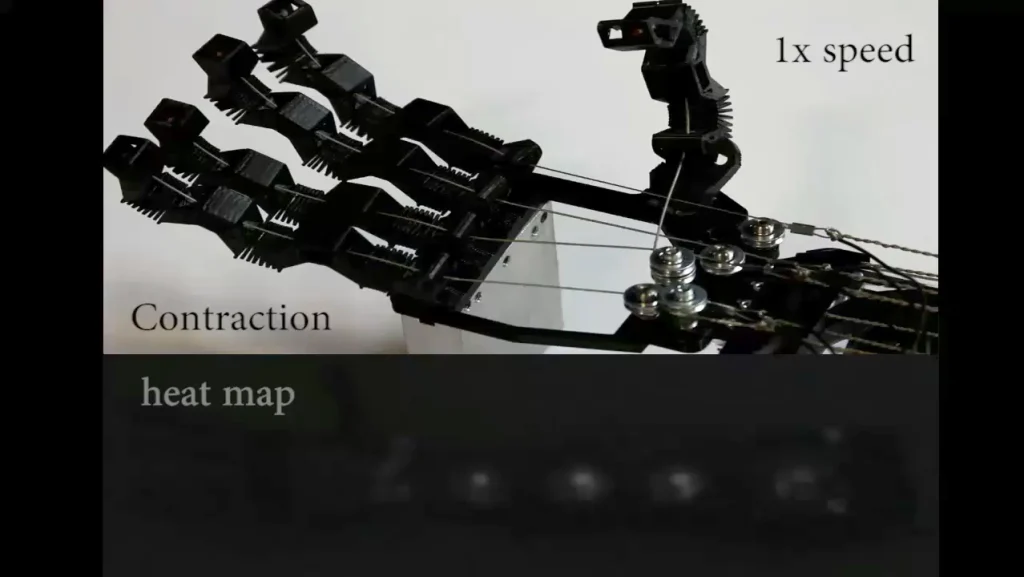
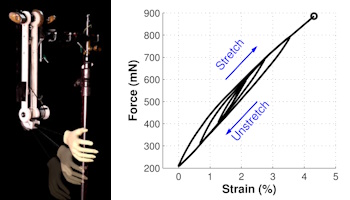
We have developed robotic actuators and mechanism designs that mimic natural muscle performance. These robot actuators have significant use for human augmentation, prosthetics, and animatronics. Our recent work shows that off-the-shelf conductive sewing thread can be formed into robotic muscles that achieve high-strength and fast-actuation in a light-weight, thin form-factor.
Our focus is now on developing a foundational approach towards muscle-powered machines that move using biomimetic muscle actuators. Despite the decades of materials research in discovering new muscles and improving existing muscles, their transition into more widespread use in robot systems and machines to date has been limited. We are therefore motivated to investigate a unifying modeling, control, and design strategy for robot muscles that could lower the barrier to muscle-powered robotics research.
A significant effort of this project is the development of an open-source platform that democratizes the fabrication, characterization/calibration, and control of robot muscles and reduces the burden to entry for robot muscles by providing accessible models, controllers, and designs that will enable new researchers and engineers in the field to quickly grasp concepts and focus on muscle-powered machine design.
Students & Collaborators
- Taylor Henderson
- Angela Liu
- Yuheng Zhi

Publications
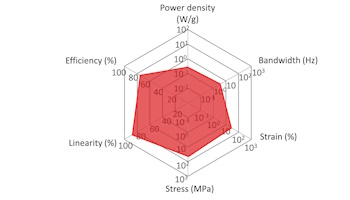
Data-driven actuator selection for artificial muscle-powered robots
Proc. IEEE International Conference on Robotics and Automation (ICRA) (2021)
Taylor West Henderson, Yuheng Zhi, Angela Liu, Michael C Yip
Robotic artificial muscles: Current progress and future perspectives
IEEE Transactions on Robotics (2019)
Jun Zhang, Jun Sheng, Ciaran O'Neill, Conor J Walsh, Robert J Wood, Jee-Hwan Ryu, Jaydev P Desai, Michael C Yip
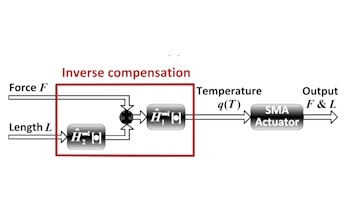
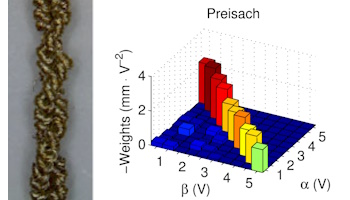
Three-dimensional hysteresis compensation enhances accuracy of robotic artificial muscles
Smart Materials and Structures (2018)
Jun Zhang, Anthony Simeonov, Michael C Yip

Bundled super-coiled polymer artificial muscles: Design, characterization, and modeling
IEEE Robotics and Automation Letters (2018)
Anthony Simeonov, Taylor Henderson, Zixuan Lan, Guhan Sundar, Adam Factor, Jun Zhang, Michael Yip
On the control and properties of supercoiled polymer artificial muscles
IEEE Transactions on Robotics (2017)
Michael C Yip, Gunter Niemeyer
Three-Dimensional Hysteresis Modeling of Robotic Artificial Muscles with Application to Shape Memory Alloy Actuators
Robotics: Science and Systems (2017)
Jun Zhang, Michael C Yip
Designing Muscle-powered Robotics with Super Coiled Polymers
Robotics: Science and Systems Workshop (2017)
Jun Zhang, Michael C Yip
Modeling and inverse compensation of hysteresis in supercoiled polymer artificial muscles
IEEE Robotics and Automation Letters (2017)
Jun Zhang, Kaushik Iyer, Anthony Simeonov, Michael C Yip
High-Performance Robotic Muscles from Conductive Nylon Sewing Thread
Proc. IEEE International Conference on Robotics and Automation (ICRA) (2015)
Michael C. Yip, Gunter Niemeyer BEST PAPER AWARD NOMINEE