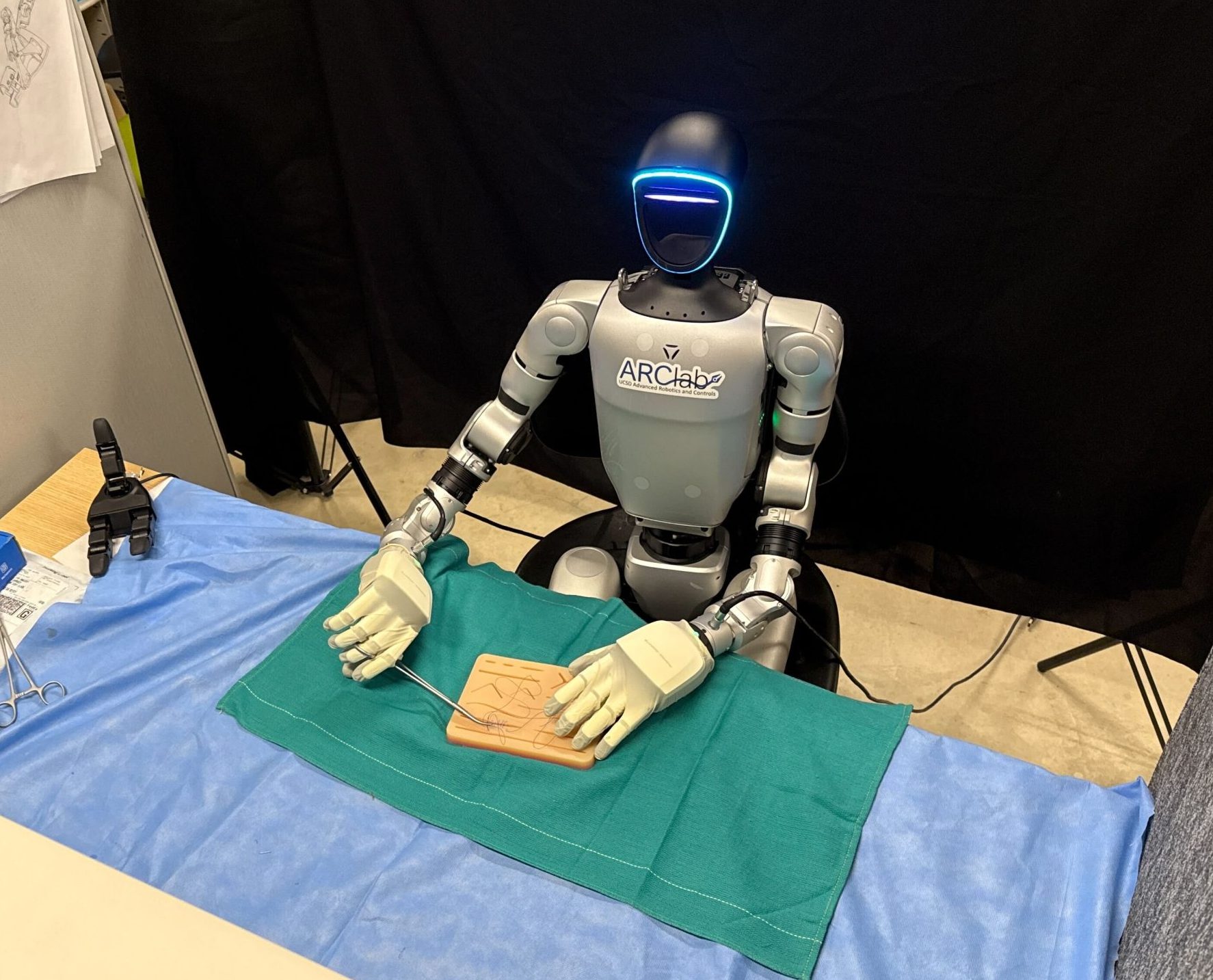
Humanoid Robots for Medicine
Humanoid Robots seem like a distant future especially in a hospital setting, when specialized robots exist to perform tasks like laparoscopic surgery.
However humanoid robots have obvious the offer many advantages to traditional surgical robots. They are the ultimate ubiquitous platform for autonomy. They have the hardware (hands and manipulators) to support nearly all instruments and equipment that medical staff, without requiring specialized robot purchases for narrow sets of tasks. Over time, they will have the ability to accomplish almost any task, without requiring specialized assistance, hardware, or setup.
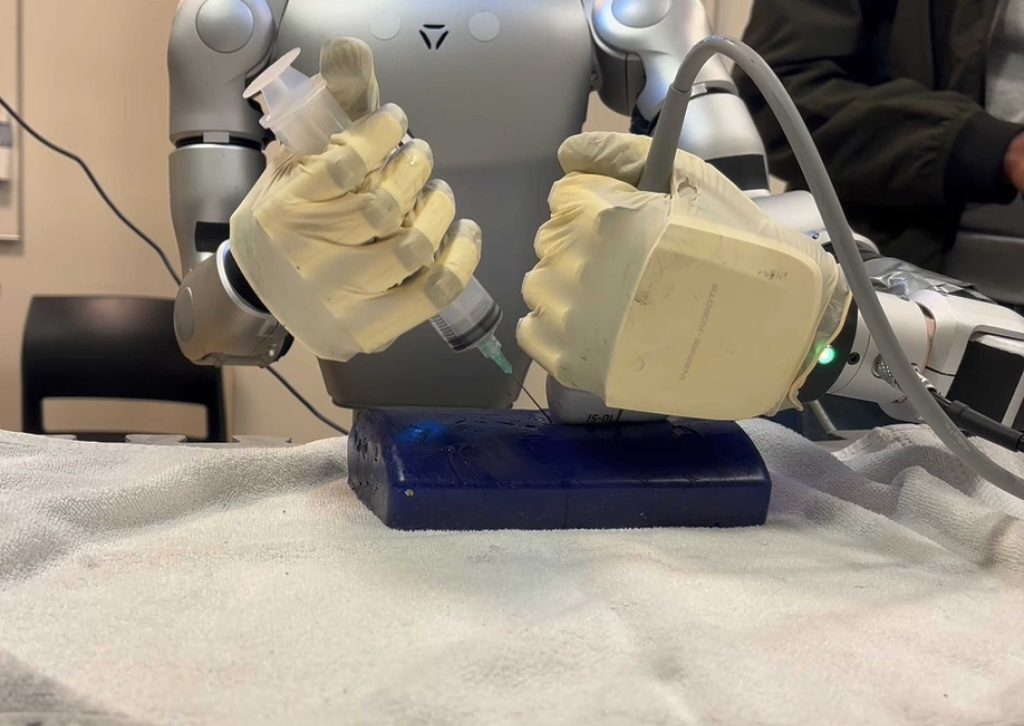
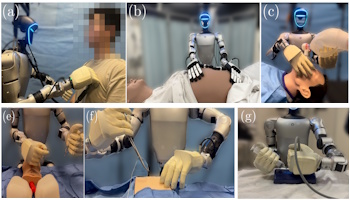
Our research group is the first group to focus on humanoid robots and their place in hospitals. This research focuses on long-term goals for humanoid autonomy, specifically fundamental research multi-fingered and multi-arm manipulation of instrumentation in a hospital, from ultrasound probes, to equipment user interfaces, to even assisting in surgery.
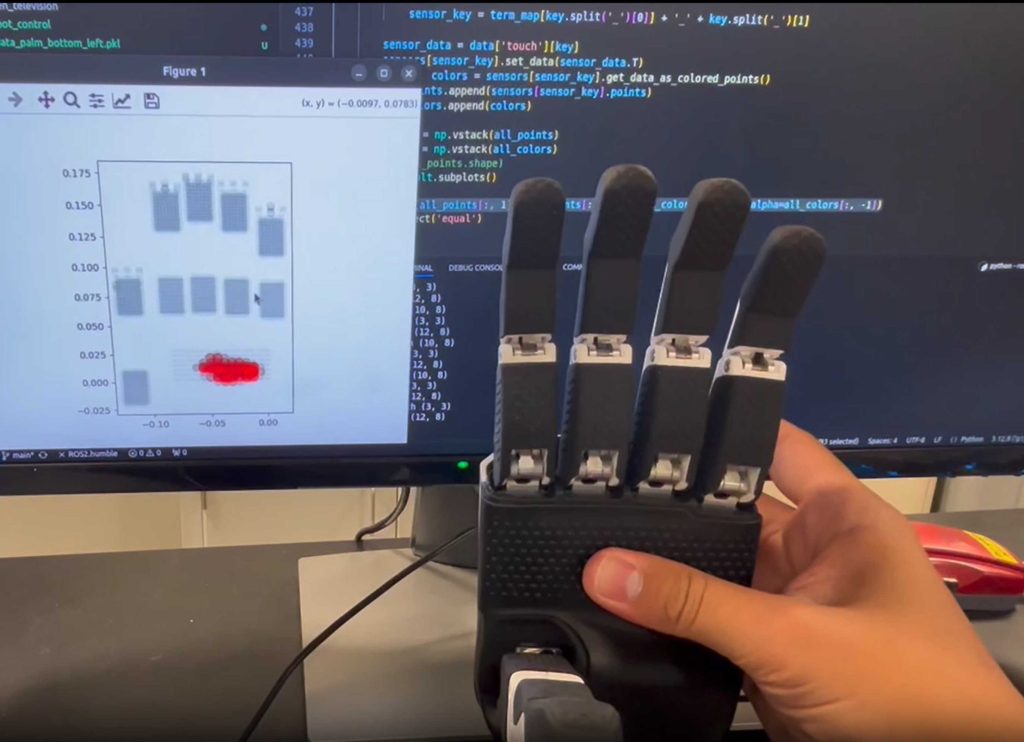
Research topics involve methods development that comprise reinforcement learning, model-based control, and vision-language models.
Students & Collaborators
- Soofiyan Atar
- Calvin Joyce
- Xiao Liang
- Lucas Liang
- Peihan Zhang
Recent Publications
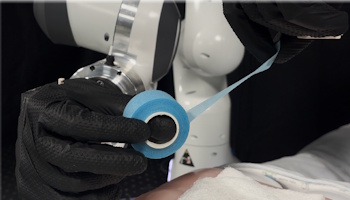
Towards Autonomous Tape Handling for Robotic Wound Redressing
arXiv preprint arXiv:2510.06127 (2025)
Xiao Liang, Lu Shen, Peihan Zhang, Soofiyan Atar, Florian Richter, Michael Yip
Humanoids in Hospitals: A Technical Study of Humanoid Robot Surrogates for Dexterous Medical Interventions
arXiv preprint arXiv:2503.12725 (2025)
Soofiyan Atar, Xiao Liang, Calvin Joyce, Florian Richter, Wood Ricardo, Charles Goldberg, Preetham Suresh, Michael Yip
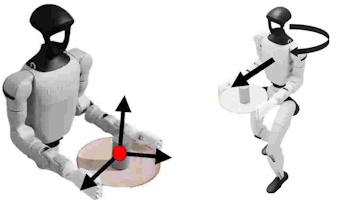
SteadyTray: Learning Object Balancing Tasks in Humanoid Tray Transport via Residual Reinforcement Learning
arXiv preprint arXiv:2603.10306 (2026)
Anlun Huang, Zhenyu Wu, Soofiyan Atar, Yuheng Zhi, Michael Yip
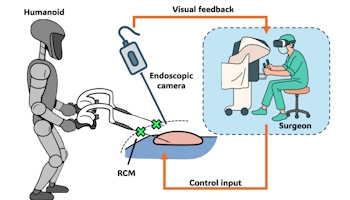
LapSurgie: humanoid robots performing surgery via teleoperated handheld laparoscopy
arXiv preprint arXiv:2510.03529 (2025)
Zekai Liang, Xiao Liang, Soofiyan Atar, Sreyan Das, Zoe Chiu, Peihan Zhang, Calvin Joyce, Florian Richter, Shanglei Liu, Michael C Yip

In-Hand Manipulation of Articulated Tools with Dexterous Robot Hands with Sim-to-Real Transfer
arXiv preprint arXiv:2509.23075 (2025)
Soofiyan Atar, Daniel Huang, Florian Richter, Michael Yip
Humanoids in Hospitals: A Technical Study of Humanoid Surrogates for Dexterous Medical Interventions
arXiv preprint arXiv:2503.12725 (2025)
Soofiyan Atar, Xiao Liang, Calvin Joyce, Florian Richter, Wood Ricardo, Charles Goldberg, Preetham Suresh, Michael Yip