Robotic Emergency Medical Evacuation
Today, human evacuation is typically managed by emergency personnel who direct and assist individuals to safety. Current methods can be slow, limited by human physical capabilities, and dangerous for the rescuers themselves. They can also struggle with accessibility issues, such as reaching people in difficult-to-access areas or those with mobility impairments.
While research has been done in the space of robot autonomy and rescue robot platforms little has been done in the space of human robot physical interaction integrating safety and path planning. In this work, we aim to define methods by which we can implement trajectories for robots to grasp and manipulate humans safely.
This research is on Physical Human Robotic interaction (pHRI), an intersection of robotics, controls, biomechanics, and modeling requiring knowledge across disciplines for a multifaceted approach to a more traditional robotics problem.
Students & Collaborators
- Lizzie Peiros
- Zih-Yun Chiu
- Yuheng Zhi
- Nikhil Shinde
- Syler Sylvester
- William Harris
- Michael Owens
- Kevin Wang
- Zoe Samuels


Publications
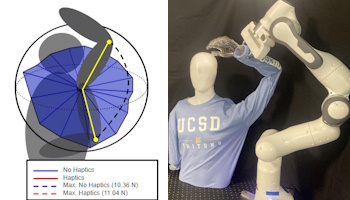
Haptic Shoulder for Rendering Biomechanically Accurate Joint Limits for Human-Robot Physical Interactions
Proc. IEEE International Conference on Robotics and Automation (ICRA) (2025)
Elizabeth Peiros, Calvin Joyce, Tarun Murugesan, Roger Nguyen, Isabella Fiorini, Rizzi Galibut, Michael C Yip

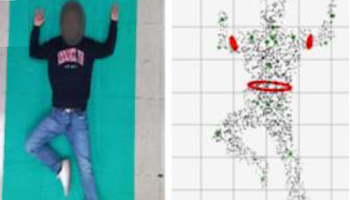
Finding biomechanically safe trajectories for robot manipulation of the human body in a search and rescue scenario
Proc. IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS) (2023)
Elizabeth Peiros, Zih-Yun Chiu, Yuheng Zhi, Nikhil Shinde, Michael C Yip
Contactless Weight Estimation of Human Body and Body Parts for Safe Robotics-Assisted Casualty Extraction
Proc. IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS) (2023)
Jaeyeon Lee, Ethan Quist, Jonathan Chambers, Michael Yip, Nathan Fisher