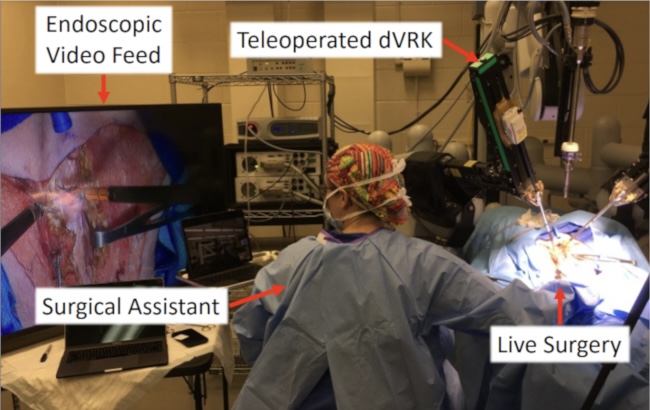
Surgical Perception
Students & Collaborators
- Florian Richter
- Xiao Liang
- Zekai Liang
- Neelay Joglekar
Collaborators:
- Ryan Orosco, M.D.
- Shanglei Liu, M.D.
- Jonathan Katz, M.D.
- Roger Sur, M.D.
Publications
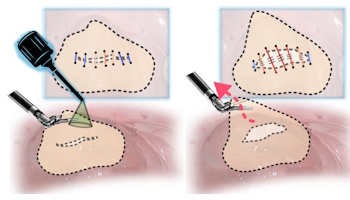
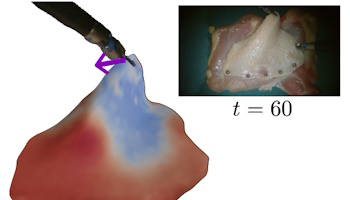
Feedback Matters: Augmenting Autonomous Dissection with Visual and Topological Feedback
arXiv preprint arXiv:2510.04074 (2025)
Chung-Pang Wang, Changwei Chen, Xiao Liang, Soofiyan Atar, Florian Richter, Michael Yip
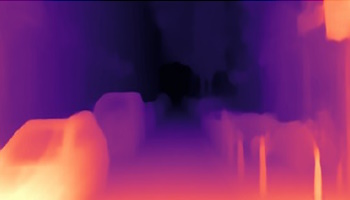
KineDepth: Utilizing Robot Kinematics for Online Metric Depth Estimation
Proc. IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS) (2025)
Soofiyan Atar, Yuheng Zhi, Florian Richter, Michael Yip
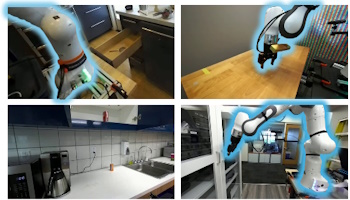
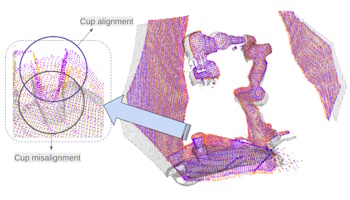
CtRNet-X: Camera-to-Robot Pose Estimation in Real-world Conditions Using a Single Camera
Proc. IEEE International Conference on Robotics and Automation (ICRA) (2025)
Jingpei Lu, Zekai Liang, Tristin Xie, Florian Ritcher, Shan Lin, Sainan Liu, Michael C Yip

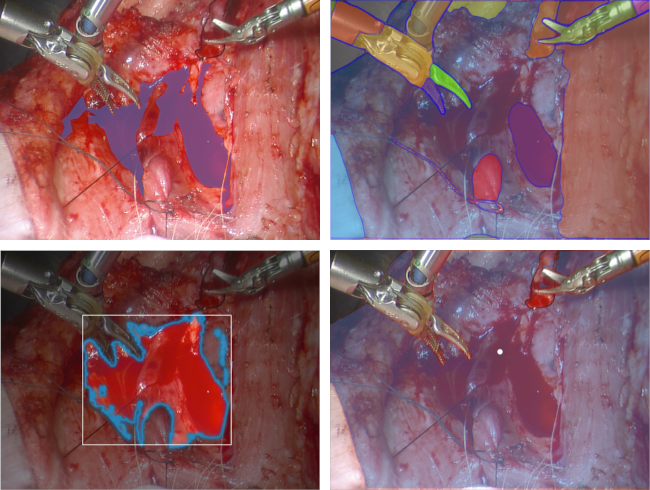
HemoSet: The First Blood Segmentation Dataset for Automation of Hemostasis Management
Proc. IEEE International Symposium on Medical Robotics (ISMR) (2024)
Albert J Miao, Shan Lin, Jingpei Lu, Florian Richter, Benjamin Ostrander, Emily K Funk, Ryan K Orosco, Michael C Yip
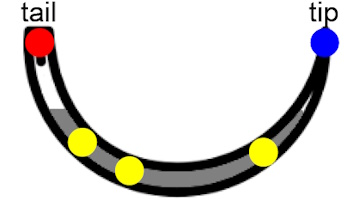
Tracking Snake-like Robots in the Wild Using Only a Single Camera
Proc. IEEE Conference on Robotics and Automation (ICRA) (2024)
Jingpei Lu, Florian Richter, Shan Lin, Michael C Yip
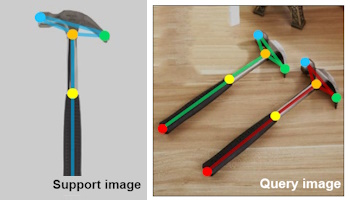
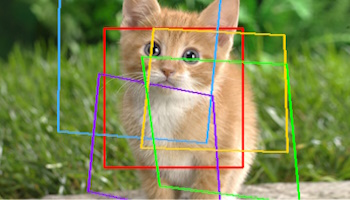
AnyOKP: One-Shot and Instance-Aware Object Keypoint Extraction with Pretrained ViT
Proc. IEEE Conference on Robotics and Automation (ICRA) (2024)
Fangbo Qin, Taogang Hou, Shan Lin, Kaiyuan Wang, Michael C Yip, Shan Yu
Real-to-Sim Deformable Object Manipulation: Optimizing Physics Models with Residual Mappings for Robotic Surgery
Proc. IEEE International Conference on Robotics and Automation (ICRA) (2024)
Xiao Liang, Fei Liu, Yutong Zhang, Yuelei Li, Shan Lin, Michael Yip

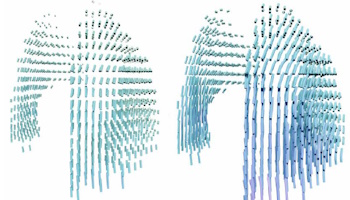
SuPerPM: A Large Deformation-Robust Surgical Perception Framework Based on Deep Point Matching Learned from Physical Constrained Simulation Data
Proc. IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS) (2024)
Shan Lin, Albert J Miao, Ali Alabiad, Fei Liu, Kaiyuan Wang, Jingpei Lu, Florian Richter, Michael C Yip
Tracking and mapping in medical computer vision: A review
Medical Image Analysis (2024)
Adam Schmidt, Omid Mohareri, Simon DiMaio, Michael C Yip, Septimiu E Salcudean
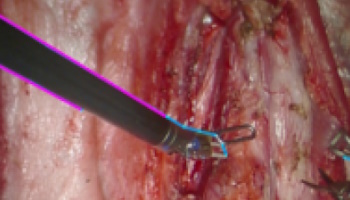
Robust Surgical Tool Tracking with Pixel-based Probabilities for Projected Geometric Primitives
Proc. IEEE International Conference on Robotics and Automation (ICRA) (2024)
Christopher D'Ambrosia, Florian Richter, Zih-Yun Chiu, Nikhil Shinde, Fei Liu, Henrik I Christensen, Michael C Yip
BAA-NGP: Bundle-adjusting accelerated neural graphics primitives
Proc. IEEE/CVF Conference on Computer Vision and Pattern Recognition (CVPR) (2024)
Sainan Liu, Shan Lin, Jingpei Lu, Alexey Supikov, Michael Yip

Rendering of Cystoscopy Video Footage: A Novel Method Utilizing Neural Radiance Field Processing
The Journal of Urology (2024)
Jonathan E Katz, Jamie Finnegan, Jingpei Lu, Shan Lin, Michael Yip, Roger Sur
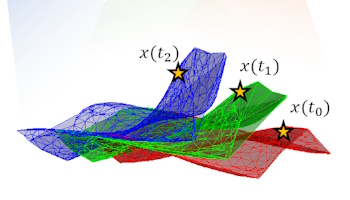
ORRN: An ODE-based recursive registration network for deformable respiratory motion estimation with lung 4DCT images
IEEE Transactions on Biomedical Engineering (2023)
Xiao Liang, Shan Lin, Fei Liu, Dimitri Schreiber, Michael Yip
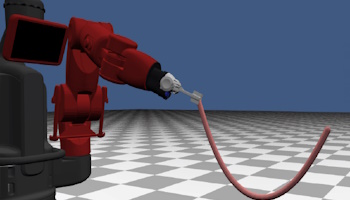
Robotic manipulation of deformable rope-like objects using differentiable compliant position-based dynamics
IEEE Robotics and Automation Letters (2023)
Fei Liu, Entong Su, Jingpei Lu, Mingen Li, Michael C Yip
SemHint-MD: Learning from Noisy Semantic Labels for Self-Supervised Monocular Depth Estimation
arXiv preprint arXiv:2303.18219 (2023)
Shan Lin, Yuheng Zhi, Michael C Yip
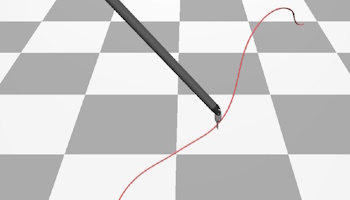
Suture thread spline reconstruction from endoscopic images for robotic surgery with reliability-driven keypoint detection
Proc. IEEE International Conference on Robotics and Automation (ICRA) (2023)
Neelay Joglekar, Fei Liu, Ryan Orosco, Michael Yip
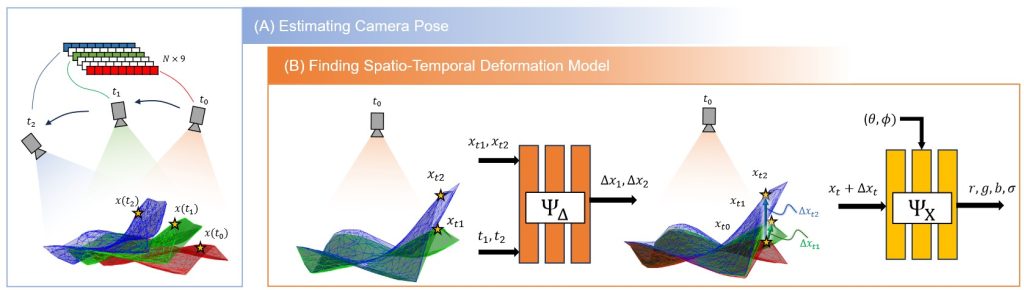
BASED: Bundle-adjusting surgical endoscopic dynamic video reconstruction using neural radiance fields
IEEE/CVF Winter Conference on Applications of Computer Vision (WACV) (2025)
Shreya Saha, Sainan Liu, Shan Lin, Jingpei Lu, Michael Yip

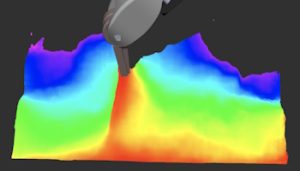
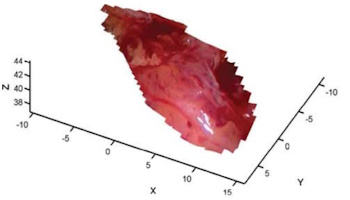
Semantic-SuPer: A Semantic-aware Surgical Perception Framework for Endoscopic Tissue Identification, Reconstruction, and Tracking
Proc. IEEE International Conference on Robotics and Automation (ICRA) (2022)
Shan Lin, Albert J Miao, Jingpei Lu, Shunkai Yu, Zih-Yun Chiu, Florian Richter, Michael C Yip

Image based reconstruction of liquids from 2d surface detections
Proc. IEEE/CVF Conference on Computer Vision and Pattern Recognition (CVPR) (2022)
Florian Richter, Ryan K Orosco, Michael C Yip
Markerless suture needle 6d pose tracking with robust uncertainty estimation for autonomous minimally invasive robotic surgery
Proc. IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS) (2022)
Zih-Yun Chiu, Albert Z Liao, Florian Richter, Bjorn Johnson, Michael C Yip
Biomedical image analysis competitions: The state of current participation practice
arXiv preprint arXiv:2212.08568 (2022)
Matthias Eisenmann, Annika Reinke, Vivienn Weru, Minu Dietlinde Tizabi, Fabian Isensee, Tim J Adler, Patrick Godau, Veronika Cheplygina, Michal Kozubek, Sharib Ali, Anubha Gupta, Jan Kybic, Alison Noble, Carlos Ortiz de Solórzano, Samiksha Pachade, Caroline Petitjean, Daniel Sage, Donglai Wei, Elizabeth Wilden, Deepak Alapatt, Vincent Andrearczyk, Ujjwal Baid, Spyridon Bakas, Niranjan Balu, Sophia Bano, Vivek Singh Bawa, Jorge Bernal, Sebastian Bodenstedt, Alessandro Casella, Jinwook Choi, Olivier Commowick, Marie Daum, Adrien Depeursinge, Reuben Dorent, Jan Egger, Hannah Eichhorn, Sandy Engelhardt, Melanie Ganz, Gabriel Girard, Lasse Hansen, Mattias Heinrich, Nicholas Heller, Alessa Hering, Arnaud Huaulmé, Hyunjeong Kim, Bennett Landman, Hongwei Bran Li, Jianning Li, Jun Ma, Anne Martel, Carlos MartÃn-Isla, Bjoern Menze, Chinedu Innocent Nwoye, Valentin Oreiller, Nicolas Padoy, Sarthak Pati, Kelly Payette, Carole Sudre, Kimberlin van Wijnen, Armine Vardazaryan, Tom Vercauteren, Martin Wagner, Chuanbo Wang, Moi Hoon Yap, Zeyun Yu, Chun Yuan, Maximilian Zenk, Aneeq Zia, David Zimmerer, Rina Bao, Chanyeol Choi, Andrew Cohen, Oleh Dzyubachyk, Adrian Galdran, Tianyuan Gan, Tianqi Guo, Pradyumna Gupta, Mahmood Haithami, Edward Ho, Ikbeom Jang, Zhili Li, Zhengbo Luo, Filip Lux, Sokratis Makrogiannis, Dominik Müller, Young-tack Oh, Subeen Pang, Constantin Pape, Gorkem Polat, Charlotte Rosalie Reed, Kanghyun Ryu, Tim Scherr, Vajira Thambawita, Haoyu Wang, Xinliang Wang, Kele Xu, Hung Yeh, Doyeob Yeo, Yixuan Yuan, Yan Zeng, Xin Zhao, Julian Abbing, Jannes Adam, Nagesh Adluru, Niklas Agethen, Salman Ahmed, Yasmina Al Khalil, Mireia Alenyà , Esa Alhoniemi, Chengyang An, Talha Anwar, Tewodros Weldebirhan Arega, Netanell Avisdris, Dogu Baran Aydogan, Yingbin Bai, Maria Baldeon Calisto, Berke Doga Basaran, Marcel Beetz, Cheng Bian, Hao Bian, Kevin Blansit, Louise Bloch, Robert Bohnsack, Sara Bosticardo, Jack Breen, Mikael Brudfors, Raphael Brüngel, Mariano Cabezas, Alberto Cacciola, Zhiwei Chen, Yucong Chen, Daniel Tianming Chen, Minjeong Cho, Min-Kook Choi, Chuantao Xie Chuantao Xie, Dana Cobzas, Julien Cohen-Adad, Jorge Corral Acero, Sujit Kumar Das, Marcela de Oliveira, Hanqiu Deng, Guiming Dong, Lars Doorenbos, Cory Efird, Sergio Escalera, Di Fan, Mehdi Fatan Serj, Alexandre Fenneteau, Lucas Fidon, Patryk Filipiak

SuPer: A Surgical Perception Framework for Endoscopic Tissue Manipulation with Surgical Robotics
IEEE Robotics and Automation Letters (2020)
Yang Li, Florian Richter, Jingpei Lu, Emily Funk, Ryan Orosco, Jianke Zhu, Michael C Yip
Tissue tracking and registration for image-guided surgery
IEEE Transactions on Medical Imaging (2012)
Michael C Yip, David G Lowe, Septimiu E Salcudean, Robert N Rohling, Christopher Y Nguan
Ultrasound-Based Image Guidance for Robot-Assisted Laparoscopic Radical Prostatectomy: Initial in-vivo Results
Proc. Information Processing in Computer-Assisted Interventions (IPCAI) (2013)
Omid Mohareri, Caitlin Schneider, Troy K Adebar, Mike C Yip, Peter Black, Christopher Y Nguan, Dale Bergman, Jonathan Seroger, Simon DiMaio, Septimiu E Salcudean
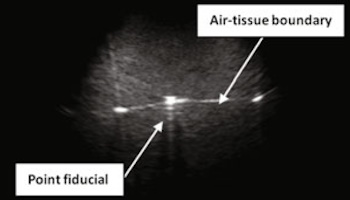
Registration of 3D ultrasound through an air–tissue boundary
IEEE Transactions on Medical Imaging (2012)
Troy K Adebar, Michael C Yip, Septimiu E Salcudean, Robert N Rohling, Christopher Y Nguan, S Larry Goldenberg
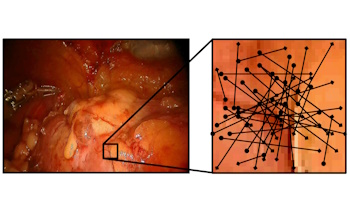
Real-time methods for long-term tissue feature tracking in endoscopic scenes
Proc. Information Processing in Computer-Assisted Interventions (IPCAI) (2012)
Michael C Yip, David G Lowe, Septimiu E Salcudean, Robert N Rohling, Christopher Y Nguan
3D ultrasound to stereoscopic camera registration through an air-tissue boundary
Proc. Medical Image Computing and Computer-Assisted Intervention (MICCAI) (2010)
Michael C Yip, Troy K Adebar, Robert N Rohling, Septimiu E Salcudean, Christopher Y Nguan
Registration of 3D ultrasound through an air-tissue boundary
IEEE Transactions on Medical Imaging (2012)
Troy K Adebar, Michael C Yip, Septimiu E Salcudean, Robert N Rohling, Christopher Y Nguan, S Larry Goldenberg