Surgical Task Automation
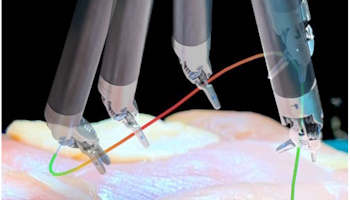
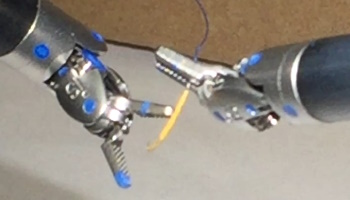
Surgical robots, such as Intuitive Surgical’s da Vinci Surgical System, have brought about more efficient surgeries by improving dexterity and reducing surgeon fatigue through teleoperational control. While these systems are already providing great care to patients, they have also opened the door to a variety of research, including surgical task automation. Surgical task automation has furthermore been an increasing area of research in an effort to improve patient throughput, reduce quality-of-care variance among surgeries, and potentially deliver automated surgery in the future. We are developing algorithms and control policies that automate surgical tasks to work towards this future.
Learning to Automate Surgery
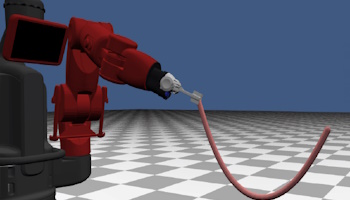
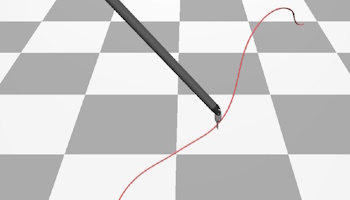
Reinforcement Learning (RL) is a machine learning framework for AI systems to solve complex problems. In recent years, success in solving challenging games and robotic manipulation tasks has increased, partly due to collaborative efforts on open-sourced environment simulators like OpenAI's Gym. We present the first open-sourced reinforcement learning environment for surgical robotics, called dVRL, which is functionally equivalent to Gym. dVRL enables prototyping and implementing state-of-art RL algorithms on surgical robotics problems, aiming to introduce autonomous robotic precision and accuracy during surgery. Combining dVRL with the da Vinci Surgical Research Kits network, we enable the surgical robotics community to leverage the newest RL strategies and RL scientists to develop algorithms for autonomous surgery challenges.
Robust Surgical Automation
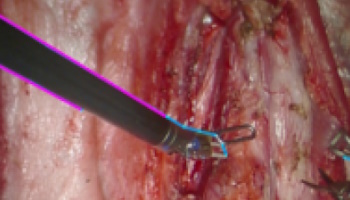
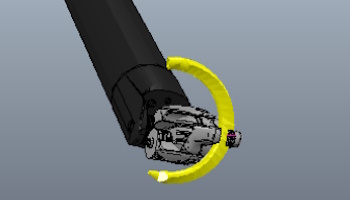
Robustness is a critical factor in surgical automation since the nature of surgical procedures demands unwavering reliability and resilience. Robust surgical automation should be capable of seamlessly adapting to dynamic surgical scenarios, handling variability in patient anatomy, and quickly recovering from disruptions, minimizing the potential for adverse impacts on the patient's well-being. Achieving robustness in surgical automation is crucial for instilling confidence in both surgeons and patients, as it guarantees consistent and reliable performance, even in challenging or unpredictable circumstances.
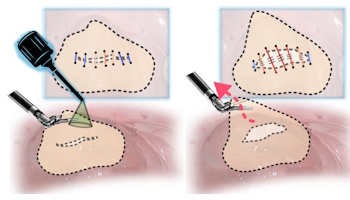
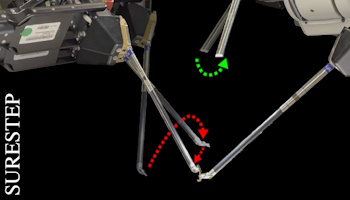
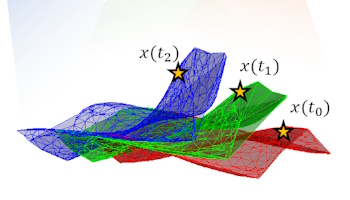
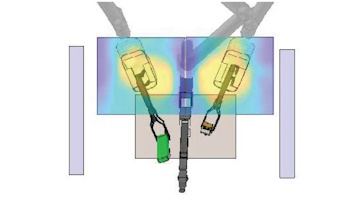
Recent efforts in our group such as SURESTEP (Surgical Uncertainty-aware Robust ESTimation TrajEctory Protocol) present frameworks for uncertainty-aware trajectory optimization that enables robust automation by enhancing visual tool tracking accuracy. It optimizes trajectories from any policies to be robust to motion and observation uncertainties commonly encountered in surgical settings.
Students & Collaborators
- Nikhil Shinde
- Zih-Yun Chiu
- *Florian Richter
- Xiao Liang
- Neelay Joglekar
- Soofiyan Atar
- Chung-Pang Wang
- Changwei Chen
Collaborators:
- *Ryan Orosco
- *Emily Funk

Publications
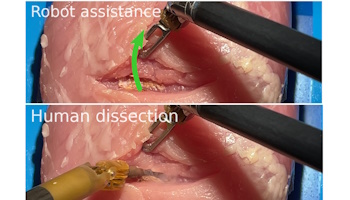
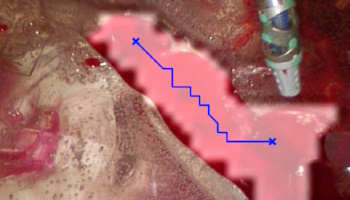
Feedback Matters: Augmenting Autonomous Dissection with Visual and Topological Feedback
arXiv preprint arXiv:2510.04074 (2025)
Chung-Pang Wang, Changwei Chen, Xiao Liang, Soofiyan Atar, Florian Richter, Michael Yip
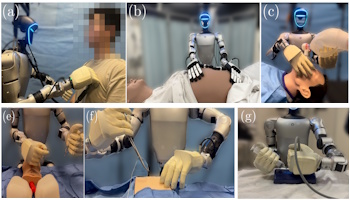
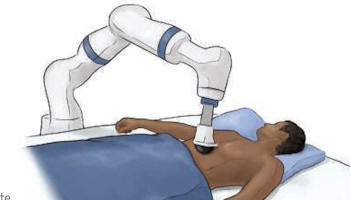
Humanoids in Hospitals: A Technical Study of Humanoid Robot Surrogates for Dexterous Medical Interventions
arXiv preprint arXiv:2503.12725 (2025)
Soofiyan Atar, Xiao Liang, Calvin Joyce, Florian Richter, Wood Ricardo, Charles Goldberg, Preetham Suresh, Michael Yip
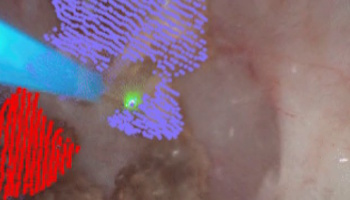
Detection of fragmentation while dusting during retrograde intrarenal laser lithotripsy: a novel computer vision and perception pipeline
Lasers in medical science (2026)
Jonathan E Katz, Orlando Diaz-Ramos, Christopher Yong-Zyn Lo, Jamie Finegan, Tung Yen Chiang, Yijie He, Zekai Liang, Michael Yip, Roger L Sur, Shan Lin
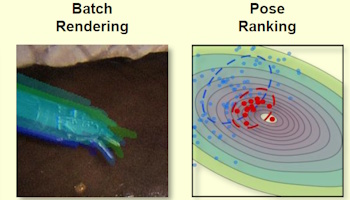
Real-time Rendering-based Surgical Instrument Tracking via Evolutionary Optimization
arXiv preprint arXiv:2603.11404 (2026)
Hanyang Hu, Zekai Liang, Florian Richter, Michael C Yip
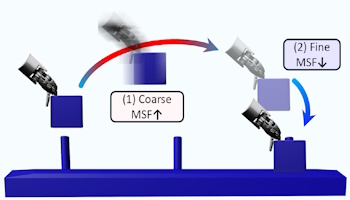
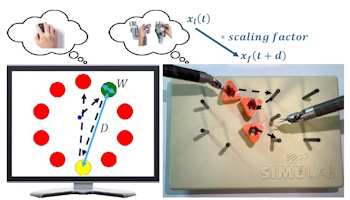
SIMS: Surgeon-Intention-driven Motion Scaling for Efficient and Precise Teleoperation
arXiv preprint arXiv:2503.01216 (2025)
Jeonghyeon Yoon, Sanghyeok Park, Hyojae Park, Cholin Kim, Michael C Yip, Minho Hwang

Efficient Surgical Robotic Instrument Pose Reconstruction in Real World Conditions Using Unified Feature Detection
arXiv preprint arXiv:2510.03532 (2025)
Zekai Liang, Kazuya Miyata, Xiao Liang, Florian Richter, Michael C Yip
The robot will see you now: Foundation models are the path forward for autonomous robotic surgery
Science Robotics (2025)
Michael Yip
Stable Tracking-in-the-Loop Control of Cable-Driven Surgical Manipulators under Erroneous Kinematic Chains
arXiv preprint arXiv:2507.05663 (2025)
Neelay Joglekar, Fei Liu, Florian Richter, Michael C Yip

3D Rendering of Cystoscopy Video Footage: A Novel Method Utilizing Neural Radiance Field Processing
Cureus (2025)
Jonathan E Katz, Jamie Finegan, Pablo F Beutelspacher, Jingpei Lu, Shan Lin, Michael Yip, Roger L Sur, Jamie L Finegan, Roger Sur
Optimal Motion Scaling for Delayed Telesurgery
2025 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS) (2025)
Jason Lim, Florian Richter, Zih-Yun Chiu, Jaeyon Lee, Ethan Quist, Nathan Fisher, Jonathan Chambers, Steven Hong, Michael C Yip
Differentiable Rendering-based Pose Estimation for Surgical Robotic Instruments
Proc. IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS) (2025)
Zekai Liang, Zih-Yun Chiu, Florian Richter, Michael C Yip

AutoPeel: Adhesion-aware Safe Peeling Trajectory Optimization for Robotic Wound Care
Proc. IEEE International Conference on Robotics and Automation (ICRA) (2025)
Xiao Liang, Youcheng Zhang, Fei Liu, Florian Richter, Michael Yip BEST PAPER AWARD NOMINATION
SurgIRL: Towards Life-Long Learning for Surgical Automation by Incremental Reinforcement Learning
IEEE Robotics and Automation Letters (2025)
Yun-Jie Ho, Zih-Yun Chiu, Yuheng Zhi, Michael C Yip
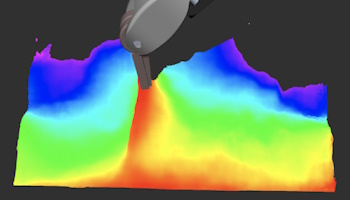
MEDiC: Autonomous Surgical Robotic Assistance to Maximizing Exposure for Dissection and Cautery
Proc. IEEE International Conference on Robotics and Automation (ICRA) (2025)
Xiao Liang, Chung-Pang Wang, Nikhil Uday Shinde, Fei Liu, Florian Richter, Michael Yip
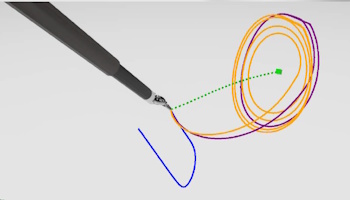
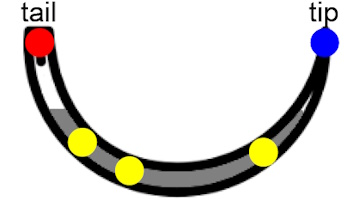
Autonomous Image-to-Grasp Robotic Suturing Using Reliability-Driven Suture Thread Reconstruction
IEEE Robotics and Automation Letters (2025)
Neelay Joglekar, Fei Liu, Florian Richter, Michael C Yip
SURESTEP: An Uncertainty-Aware Trajectory Optimization Framework to Enhance Visual Tool Tracking for Robust Surgical Automation
Proc. IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS) (2024)
Nikhil U Shinde, Zih-Yun Chiu, Florian Richter, Jason Lim, Yuheng Zhi, Sylvia Herbert, Michael C Yip
JIGGLE: An Active Sensing Framework for Boundary Parameters Estimation in Deformable Surgical Environments
Robotics: Science and Systems (2024)
Nikhil Uday Shinde, Xiao Liang, Fei Liu, Yutong Zhang, Florian Richter, Sylvia Herbert, Michael C Yip

Bridging Real-to-Sim Gaps through Online Stiffness Optimization with Perception-Enabled Residual Mapping
Proc. Workshop on Integrated Perception, Planning, and Control for Physically and Contextually-Aware Robot Autonomy, IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS) (2024)
Xiao Liang, Fei Liu, Yutong Zhang, Michael Yip

HemoSet: The First Blood Segmentation Dataset for Automation of Hemostasis Management
Proc. IEEE International Symposium on Medical Robotics (ISMR) (2024)
Albert J Miao, Shan Lin, Jingpei Lu, Florian Richter, Benjamin Ostrander, Emily K Funk, Ryan K Orosco, Michael C Yip
Real-to-Sim Deformable Object Manipulation: Optimizing Physics Models with Residual Mappings for Robotic Surgery
Proc. IEEE International Conference on Robotics and Automation (ICRA) (2024)
Xiao Liang, Fei Liu, Yutong Zhang, Yuelei Li, Shan Lin, Michael Yip

SuPerPM: A Large Deformation-Robust Surgical Perception Framework Based on Deep Point Matching Learned from Physical Constrained Simulation Data
Proc. IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS) (2024)
Shan Lin, Albert J Miao, Ali Alabiad, Fei Liu, Kaiyuan Wang, Jingpei Lu, Florian Richter, Michael C Yip
The current state of autonomous suturing: a systematic review
Surgical Endoscopy (2024)
Benjamin T Ostrander, Daniel Massillon, Leo Meller, Zih-Yun Chiu, Michael Yip, Ryan K Orosco

Achieving Autonomous Cloth Manipulation with Optimal Control via Differentiable Physics-Aware Regularization and Safety Constraints
Proc. IEEE Conference on Robotics and Automation (ICRA) (2024)
Yutong Zhang, Fei Liu, Xiao Liang, Michael Yip
Robust Surgical Tool Tracking with Pixel-based Probabilities for Projected Geometric Primitives
Proc. IEEE International Conference on Robotics and Automation (ICRA) (2024)
Christopher D'Ambrosia, Florian Richter, Zih-Yun Chiu, Nikhil Shinde, Fei Liu, Henrik I Christensen, Michael C Yip
Real-time constrained 6d object-pose tracking of an in-hand suture needle for minimally invasive robotic surgery
Proc. IEEE International Conference on Robotics and Automation (ICRA) (2023)
Zih-Yun Chiu, Florian Richter, Michael C Yip BEST PAPER AWARD
Robotic manipulation of deformable rope-like objects using differentiable compliant position-based dynamics
IEEE Robotics and Automation Letters (2023)
Fei Liu, Entong Su, Jingpei Lu, Mingen Li, Michael C Yip
Suture thread spline reconstruction from endoscopic images for robotic surgery with reliability-driven keypoint detection
Proc. IEEE International Conference on Robotics and Automation (ICRA) (2023)
Neelay Joglekar, Fei Liu, Ryan Orosco, Michael Yip
BASED: Bundle-adjusting surgical endoscopic dynamic video reconstruction using neural radiance fields
IEEE/CVF Winter Conference on Applications of Computer Vision (WACV) (2025)
Shreya Saha, Sainan Liu, Shan Lin, Jingpei Lu, Michael Yip
Artificial intelligence meets medical robotics
Science (2023)
Michael Yip, Septimiu Salcudean, Ken Goldberg, Kaspar Althoefer, Arianna Menciassi, Justin D Opfermann, Axel Krieger, Krithika Swaminathan, Conor J Walsh, He Huang, I-Chieh Lee

Semantic-SuPer: A Semantic-aware Surgical Perception Framework for Endoscopic Tissue Identification, Reconstruction, and Tracking
Proc. IEEE International Conference on Robotics and Automation (ICRA) (2022)
Shan Lin, Albert J Miao, Jingpei Lu, Shunkai Yu, Zih-Yun Chiu, Florian Richter, Michael C Yip

Porcine Model for Open Robotic Thyroidectomy
Journal of Robotic Surgery (2022)
Emily Funk, Won Seo Park, Florian Richter, Benjamin T Ostrander, Michael Yip, Philip A Weissbrod, Ryan K Orosco
Markerless suture needle 6d pose tracking with robust uncertainty estimation for autonomous minimally invasive robotic surgery
Proc. IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS) (2022)
Zih-Yun Chiu, Albert Z Liao, Florian Richter, Bjorn Johnson, Michael C Yip
Super deep: A surgical perception framework for robotic tissue manipulation using deep learning for feature extraction
Proc. IEEE International Conference on Robotics and Automation (ICRA) (2021)
Jingpei Lu, Ambareesh Jayakumari, Florian Richter, Yang Li, Michael C Yip
Optimal multi-manipulator arm placement for maximal dexterity during robotics surgery
Proc. IEEE International Conference on Robotics and Automation (ICRA) (2021)
Mingwei Xu, James Di, Nikhil Das, Michael C Yip
Real-to-sim registration of deformable soft tissue with position-based dynamics for surgical robot autonomy
Proc. IEEE International Conference on Robotics and Automation (ICRA) (2021)
Fei Liu, Zihan Li, Yunhai Han, Jingpei Lu, Florian Richter, Michael C Yip
Model-predictive control of blood suction for surgical hemostasis using differentiable fluid simulations
Proc. IEEE International Conference on Robotics and Automation (ICRA) (2021)
Jingbin Huang, Fei Liu, Florian Richter, Michael C Yip BEST PAPER AWARD NOMINEE

From bench to bedside: The first live robotic surgery on the dVRK to enable remote telesurgery with motion scaling
Proc. IEEE International Symposium on Medical Robotics (ISMR) (2021)
Florian Richter, Emily K Funk, Won Seo Park, Ryan K Orosco, Michael C Yip
Autonomous robotic suction to clear the surgical field for hemostasis using image-based blood flow detection
IEEE Robotics and Automation Letters (2021)
Florian Richter, Shihao Shen, Fei Liu, Jingbin Huang, Emily K Funk, Ryan K Orosco, Michael C Yip
Bimanual regrasping for suture needles using reinforcement learning for rapid motion planning
Proc. IEEE International Conference on Robotics and Automation (ICRA) (2021)
Zih-Yun Chiu, Florian Richter, Emily K Funk, Ryan K Orosco, Michael C Yip

SuPer: A Surgical Perception Framework for Endoscopic Tissue Manipulation with Surgical Robotics
IEEE Robotics and Automation Letters (2020)
Yang Li, Florian Richter, Jingpei Lu, Emily Funk, Ryan Orosco, Jianke Zhu, Michael C Yip
Vibration-based multi-axis force sensing: Design, characterization, and modeling
IEEE Robotics and Automation Letters (2020)
Winnie Kuang, Michael Yip, Jun Zhang
A 2D surgical simulation framework for tool-tissue interaction
arXiv preprint arXiv:2010.13936 (2020)
Yunhai Han, Fei Liu, Michael C Yip
Open-sourced reinforcement learning environments for surgical robotics
arXiv preprint arXiv:1903.02090 (2019)
Florian Richter, Ryan K Orosco, Michael C Yip
Vision-based force feedback estimation for robot-assisted surgery using instrument-constrained biomechanical three-dimensional maps
IEEE Robotics and Automation Letters (2018)
Nazim Haouchine, Winnie Kuang, Stephane Cotin, Michael Yip
Model-less hybrid position/force control: a minimalist approach for continuum manipulators in unknown, constrained environments
IEEE Robotics and Automation Letters (2016)
Michael Yip, David Camarillo BEST PAPER AWARD
Autonomous control of continuum robot manipulators for complex cardiac ablation tasks
Journal of Medical Robotics Research (2017)
Michael C Yip, Jake A Sganga, David B Camarillo
Model-Less Feedback Control of Continuum Manipulators in Constrained Environments
IEEE Transactions on Robotics (2014)
Michael C Yip, David B Camarillo
Model-less control of a flexible robotic catheter
Workshop on Advances in Flexible Robots for Surgical Interventions, Proc. IEEE International Conference on Robotics and Automation (ICRA) (2014)
Michael C Yip, Paul J. Wang, David B. Camarillo BEST PAPER AWARD
Robotic force stabilization for beating heart intracardiac surgery
Proc. Medical Image Computing and Computer-Assisted Intervention (MICCAI) (2009)
Shelten G Yuen, Michael C Yip, Nikolay V Vasilyev, Douglas P Perrin, Pedro J Del Nido, Robert D Howe
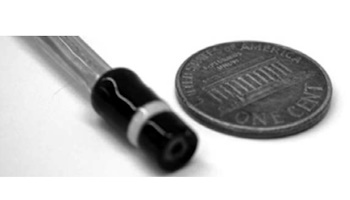
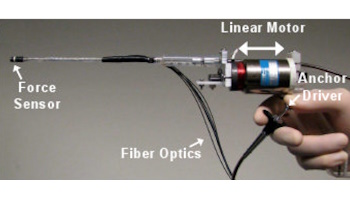
A robust uniaxial force sensor for minimally invasive surgery
IEEE Transactions on Biomedical Engineering (2010)
Michael C Yip, Shelten G Yuen, Robert D Howe
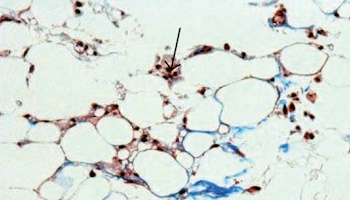
Indirect low-intensity ultrasonic stimulation for tissue engineering
Journal of Tissue Engineering (2010)
Hyoungshin Park, Michael C Yip, Beata Chertok, Joseph Kost, James B Kobler, Robert Langer, Steven M Zeitels
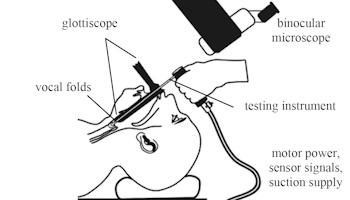
Intra-Operative Laryngoscopic Instrument for Characterizing Vocal Fold Viscoelasticity
Frontiers in Biomedical Devices (2007)
Mark P Ottensmeyer, Michael Yip, Conor J Walsh, James B Kobler, James T Heaton, Steven M Zeitels
Humanoids in Hospitals: A Technical Study of Humanoid Surrogates for Dexterous Medical Interventions
arXiv preprint arXiv:2503.12725 (2025)
Soofiyan Atar, Xiao Liang, Calvin Joyce, Florian Richter, Wood Ricardo, Charles Goldberg, Preetham Suresh, Michael Yip