Neural Motion Planning
Motion planning is a well-known problem in robotics. It can be defined as the process of finding a collision-free path for a robot from its initial to goal position while avoiding collisions with any obstacles or other agents present in the environment. Motion planning is among the fundamental problems of robotics and therefore, have been of tremendous importance to the robotics community. The challenge of building computationally efficient planning algorithms has lasted since the late 1980s. Despite previous efforts to design fast, efficient classical planning algorithms, the current state-of-the-art struggle to offer methods which scale to the high-dimensional setting that is common in many real-world applications such as self-driving cars, robot surgery, space missions, to name a few.
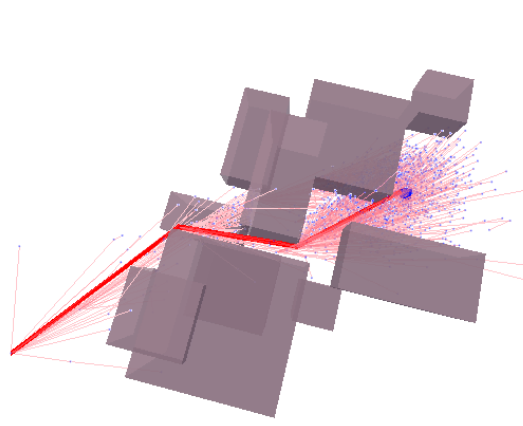
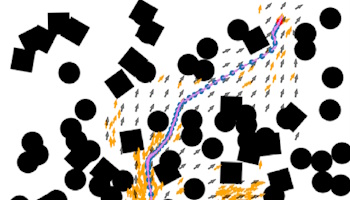
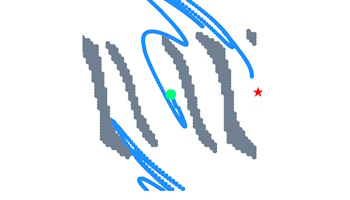
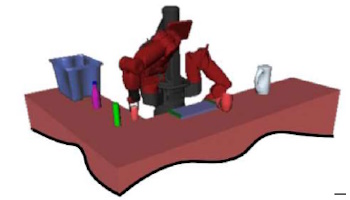
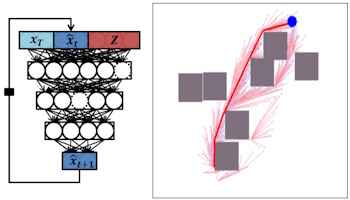
We focus on a new era of planning algorithms called the Neural Motion Planners that take past experiences into account and learn to embed a classical planner. The learned planner upon seeing a new planning problem outputs the collision-free paths without performing an exhaustive search of the given environment. In this aspect, we have proposed a framework called Motion Planning Networks (MPNet). MPNet consists of an encoder network that encodes the robot’s surroundings into a latent space, and a planning network that takes the environment encoding, and start and goal robotic configurations to output a collision-free feasible path connecting the given configurations in the fastest time possible. The proposed method
- plans motion irrespective of the obstacle’s geometry,
- generate adaptive samples for sampling-based planning algorithms
- demonstrates exceptional execution times that scale better than the state-of-art planners
- generalizes to new unseen obstacle locations, and
- has completeness guarantees
- and is a life-long learner.
Our future objectives are twofold. One, solve a perception problem for learning-based planning methods, i.e., to learn plannable state space representations. Second, extend MPNet to solve kinodynamic planning problems by learning lower dimension manifolds.
Students & Collaborators
- Yuheng Zhi
- Anlun Huang
Publications
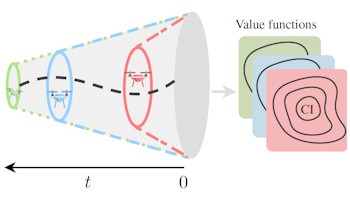
From space to time: Enabling adaptive safety with learned value functions via disturbance recasting
arXiv preprint arXiv:2509.19597 (2025)
Sander Tonkens, Nikhil Uday Shinde, Azra Begzadić, Michael C Yip, Jorge Cortés, Sylvia L Herbert
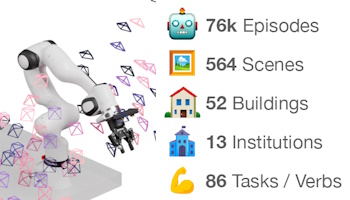
DROID: A large-scale in-the-wild robot manipulation dataset
Robotics: Science and Systems (2024)
Alexander Khazatsky, Karl Pertsch, Suraj Nair, Ashwin Balakrishna, Sudeep Dasari, Siddharth Karamcheti, Soroush Nasiriany, Mohan Kumar Srirama, Lawrence Yunliang Chen, Kirsty Ellis, Peter David Fagan, Joey Hejna, Masha Itkina, Marion Lepert, Yecheng Jason Ma, Patrick Tree Miller, Jimmy Wu, Suneel Belkhale, Shivin Dass, Huy Ha, Arhan Jain, Abraham Lee, Youngwoon Lee, Marius Memmel, Sungjae Park, Ilija Radosavovic, Kaiyuan Wang, Albert Zhan, Kevin Black, Cheng Chi, Kyle Beltran Hatch, Shan Lin, Jingpei Lu, Jean Mercat, Abdul Rehman, Pannag R Sanketi, Archit Sharma, Cody Simpson, Quan Vuong, Homer Rich Walke, Blake Wulfe, Ted Xiao, Jonathan Heewon Yang, Arefeh Yavary, Tony Z Zhao, Christopher Agia, Rohan Baijal, Mateo Guaman Castro, Daphne Chen, Qiuyu Chen, Trinity Chung, Jaimyn Drake, Ethan Paul Foster, Jensen Gao, David Antonio Herrera, Minho Heo, Kyle Hsu, Jiaheng Hu, Donovon Jackson, Charlotte Le, Yunshuang Li, Kevin Lin, Roy Lin, Zehan Ma, Abhiram Maddukuri, Suvir Mirchandani, Daniel Morton, Tony Nguyen, Abigail O'Neill, Rosario Scalise, Derick Seale, Victor Son, Stephen Tian, Emi Tran, Andrew E Wang, Yilin Wu, Annie Xie, Jingyun Yang, Patrick Yin, Yunchu Zhang, Osbert Bastani, Glen Berseth, Jeannette Bohg, Ken Goldberg, Abhinav Gupta, Abhishek Gupta, Dinesh Jayaraman, Joseph J Lim, Jitendra Malik, Roberto MartÃn-MartÃn, Subramanian Ramamoorthy, Dorsa Sadigh, Shuran Song, Jiajun Wu, Michael C Yip, Yuke Zhu, Thomas Kollar, Sergey Levine, Chelsea Finn

Zero-Shot Constrained Motion Planning Transformers Using Learned Sampling Dictionaries
Proc. IEEE Conference on Robotics and Automation (ICRA) (2024)
Jacob J Johnson, Ahmed H Qureshi, Michael C Yip
Learning sampling dictionaries for efficient and generalizable robot motion planning with transformers
IEEE Robotics and Automation Letters (2023)
Jacob J Johnson, Ahmed H Qureshi, Michael C Yip

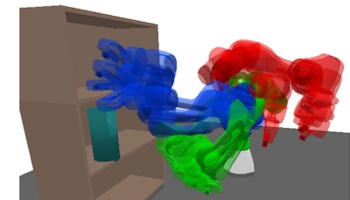
NeRP: Neural rearrangement planning for unknown objects
Robotics: Science and Systems (RSS) (2021)
Ahmed H Qureshi, Arsalan Mousavian, Chris Paxton, Michael C Yip, Dieter Fox
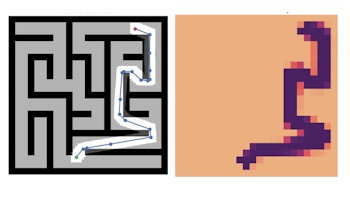
Motion planning transformers: A motion planning framework for mobile robots
arXiv preprint arXiv:2106.02791 (2021)
Jacob J Johnson, Uday S Kalra, Ankit Bhatia, Linjun Li, Ahmed H Qureshi, Michael C Yip
Motion planning transformers: One model to plan them all
Open Review (2021)
Jacob John Johnson, Linjun Li, Ahmed Qureshi, Michael C Yip
MPC-MPNet: Model-predictive motion planning networks for fast, near-optimal planning under kinodynamic constraints
IEEE Robotics and Automation Letters (2021)
Linjun Li, Yinglong Miao, Ahmed H Qureshi, Michael C Yip
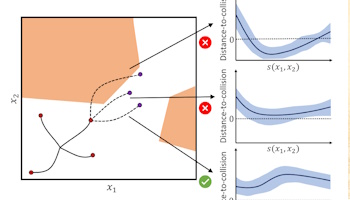
Chance-constrained motion planning using modeled distance-to-collision functions
Proc. IEEE International Conference on Automation Science and Engineering (CASE) (2021)
Jacob J Johnson, Michael C Yip
Constrained motion planning networks x
IEEE Transactions on Robotics (2021)
Ahmed Hussain Qureshi, Jiangeng Dong, Asfiya Baig, Michael C Yip
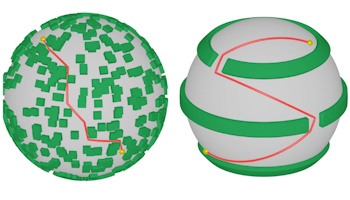
Neural manipulation planning on constraint manifolds
IEEE Robotics and Automation Letters (2020)
Ahmed H Qureshi, Jiangeng Dong, Austin Choe, Michael C Yip
Dynamically constrained motion planning networks for non-holonomic robots
Proc. IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS) (2020)
Jacob J Johnson, Linjun Li, Fei Liu, Ahmed H Qureshi, Michael C Yip

Motion planning networks: Bridging the gap between learning-based and classical motion planners
IEEE Transactions on Robotics (2020)
Ahmed Hussain Qureshi, Yinglong Miao, Anthony Simeonov, Michael C Yip

Motion planning networks
Proc. IEEE International Conference on Robotics and Automation (ICRA) (2019)
Ahmed H Qureshi, Anthony Simeonov, Mayur J Bency, Michael C Yip

Neural path planning: Fixed time, near-optimal path generation via oracle imitation
Proc. IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS) (2019)
Mayur J Bency, Ahmed H Qureshi, Michael C Yip
Deeply informed neural sampling for robot motion planning
Proc. IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS) (2018)
Ahmed H Qureshi, Michael C Yip