Learning Robot Collision & Distance-to-Collision Fields
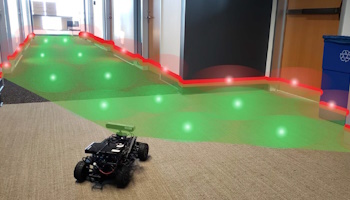
Motion planning, the task of determing a path for a robot from a start to a goal position while avoiding obstacles, is a requirement for almost all robot applications. For robots with many degrees-of-freedom, motion planning must be performed in complex, high-dimensional spaces. In these high-dimensional spaces, many feasible robot configurations are chained together to form a motion plan, requiring hundreds or thousands of costly collision checks.
Repeated collision checking is computationally expensive, taking up to 90% of modern motion planners’ computation time. Most motion planning researchers look into reducing the number of collision checks, but not much effort is expended into accelerating the collision checks themselves.
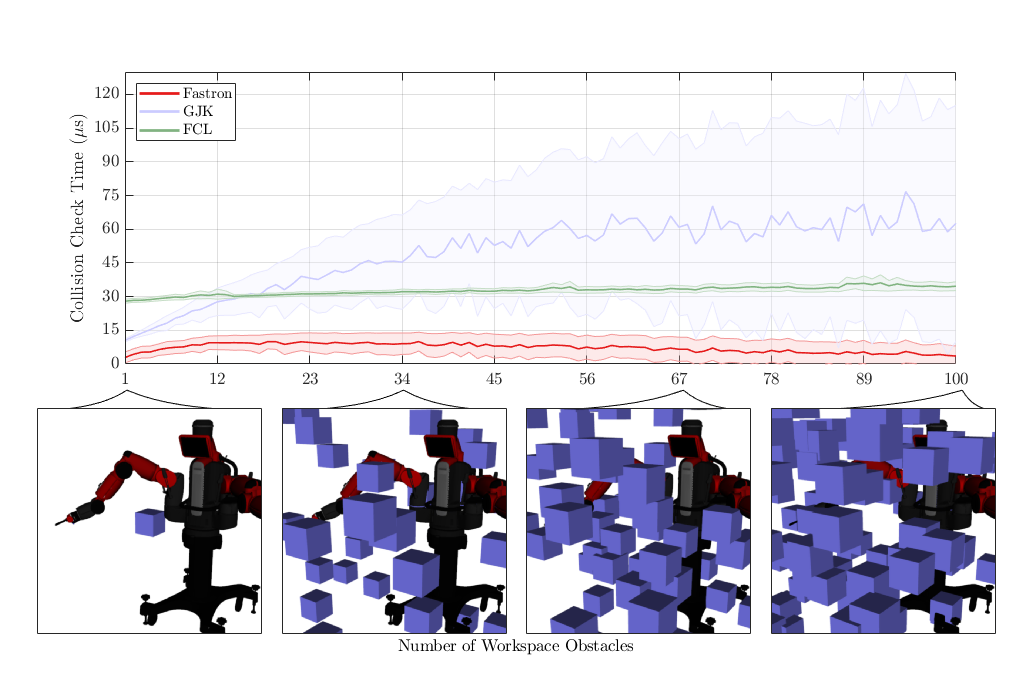
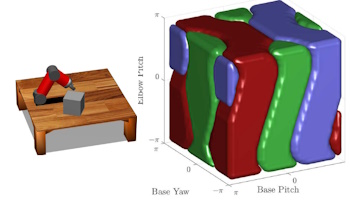
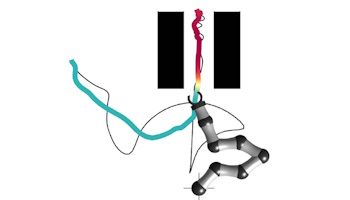
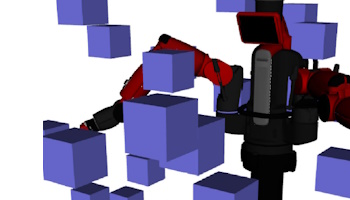
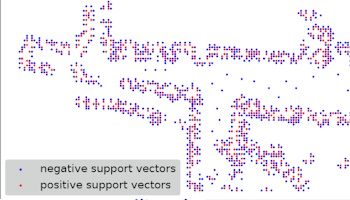
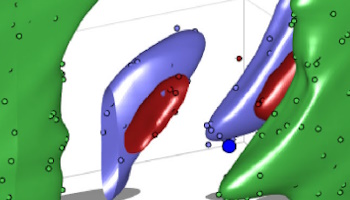
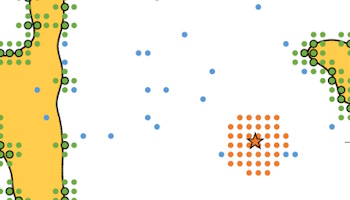
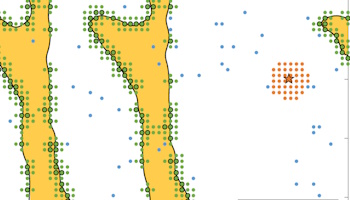
We investigate machine learning models that may be used as a fast proxy to standard collision checking and distance-to-collision paradigms. Our proxy collision detection algorithm, Fastron, accurately determines a robot’s collision status an order of magnitude faster than state-of-the-art collision checking methods, efficiently updates in response to a changing environment, and scales well with large numbers of collision objects. Current research investigates further speed and accuracy improvements, GPU parallelization, probability-of-collision predictions, new feature spaces, and collision-free configuration generator models.
Students & Collaborators
- Yuheng Zhi
- Anlun Huang
Publications
Back to Base: Towards Hands-Off Learning via Safe Resets with Reach-Avoid Safety Filters
Learning for Decision and Control Conference (L4DC) (2025)
Azra Begzadić, Nikhil Uday Shinde, Sander Tonkens, Dylan Hirsch, Kaleb Ugalde, Michael C Yip, Jorge Cortés, Sylvia Herbert
Diffco: Autodifferentiable proxy collision detection with multiclass labels for safety-aware trajectory optimization
IEEE Transactions on Robotics (2022)
Yuheng Zhi, Nikhil Das, Michael Yip
Autonomous navigation in unknown environments with sparse bayesian kernel-based occupancy mapping
IEEE Transactions on Robotics (2022)
Thai Duong, Michael Yip, Nikolay Atanasov
Configuration space decomposition for scalable proxy collision checking in robot planning and control
IEEE Robotics and Automation Letters (2022)
Mrinal Verghese, Nikhil Das, Yuheng Zhi, Michael Yip
Stochastic modeling of distance to collision for robot manipulators
IEEE Robotics and Automation Letters (2020)
Nikhil Das, Michael C Yip
Learning-based proxy collision detection for robot motion planning applications
IEEE Transactions on Robotics (2020)
Nikhil Das, Michael Yip
Autonomous navigation in unknown environments using sparse kernel-based occupancy mapping
Proc. IEEE International Conference on Robotics and Automation (ICRA) (2020)
Thai Duong, Nikhil Das, Michael Yip, Nikolay Atanasov
Forward Kinematics Kernel for Improved Proxy Collision Checking
IEEE Robotics and Automation Letters (2019)
Nikhil Das, Michael C Yip
Fastron: A Learning-Based Configuration Space Model for Rapid Collision Detection for Gross Motion Planning in Changing Environments
Proc. Robotics: Science and Systems Workshop on (Empirically) Data-Driven Manipulation (2017)
Nikhil Das, Naman Gupta, Michael Yip
Fastron: An Online Learning-Based Model and Active Learning Strategy for Proxy Collision Detection
Proc. Conference on Robot Learning (CoRL) (2017)
Nikhil Das, Naman Gupta, Michael Yip